Mini Plataforma Inteligente
Objetivo del Proyecto
Desarrollo de una plataforma inteligente para ambientes interiores, de dimensiones reducidas, para utilizar en diferentes aplicaciones de robótica, como por ejemplo inspección, robótica colaborativa, sumo de robots, futbol de robots, etc.
Además, y como consecuencia de los requerimientos planteados para su desarrollo, se obtendrá una plataforma modular (y cada uno de estos módulos fácilmente reutilizables para otros proyectos/aplicaciones), con sensores fabricados por el grupo, pero 100% compatibles con sensores del mismo tipo estándares, de muy fácil fabricación y armado, totalmente reproducible en serie y por supuesto con un bajo costo de fabricación, pensando en futuras transferencias tecnológicas.
Cabe destacar que utiliza tecnología de última generación, tanto en sus componentes como en los métodos de fabricación empleados, obteniéndose así un ciclo de vida tecnológico del producto que asegura la utilización de la misma por un tiempo razonable, respecto al tiempo invertido en su desarrollo…
Desarrollo
En la actualidad se pueden encontrar infinidad de plataformas inteligentes desarrolladas por grupos de investigación, empresas privadas, etc. La mayoría de estas, se encuentran orientadas a aplicaciones particulares, que si bien es posible adaptarlas para otra actividad, se requiere un tiempo relativamente prolongado y muchas veces hay que realizar demasiados cambios, desaprovechando tiempo y recursos. Por este motivo una de las premisas de nuestra plataforma es que todas sus partes sean rápidamente reutilizables en otros proyectos. Por otro parte, y desde el punto de vista tecnológico, la plataforma cuenta con dimensiones físicas, que no fueron determinadas al azar, sino que por el contrario, son compatibles para las clásicas competencias de robótica móvil, como son sumo de robots y futbol de robots. Esto significa que puede ser usada para cualquiera de estas competencias sin realizar ninguna modificación física, lo que le otorga un alto grado de versatilidad con respecto a otros robots móviles.
Descripción del proyecto
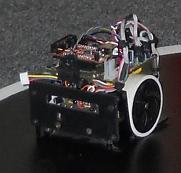
- El proyecto es una plataforma móvil inteligente, para aplicaciones de robótica móvil, robótica colaborativa y para aplicaciones de investigación en algoritmos de inteligencia artificial y control. Se puede dividir en 3 partes: estructura mecánica, hardware electrónico y desarrollo del software.
- La estructura mecánica está fabricada íntegramente en acrílico y posee los anclajes necesarios para todas las partes componentes del robot (batería, electrónica, sensores, etc.). Posee ruedas para su desplazamiento, dispuestas en configuración diferencial. La motorización se realiza con motorreductores de corriente continua, con tensión de alimentación de hasta 12V.
- El hardware electrónico posee una placa base, que contiene los elementos de potencia para el manejo de los motores y todos los puertos y conectores necesarios para el conexionado de periféricos, como ser sensores, alimentación, comunicación, etc. Esta placa base dispone de un zócalo en donde se conecta otra placa que posee el microcontrolador encargado de todo el manejo del robot. De esta manera, el hardware es independiente del microcontrolador utilizado, lo cual permite la reutilización de la placa base para otros robots como así también su fácil reemplazo, teniendo en cuenta el alto grado de avance de los mismos.
- El microcontrolador utilizado actualmente es un ARM 7 de 32 bits, con una frecuencia máxima de ejecución de 60 MHz, lo que permite que el robot pueda ejecutar varias tareas con gran velocidad.
- El sistema sensorial está compuesto por sensores infrarrojos para el sensado de objetos a baja distancia, un sensor por ultrasonidos (Sonar) para la medición de distancias hasta un máximo de 5 metros y sensores de efecto hall utilizados en los motores para calcular indirectamente la velocidad. También dispondrá de un sensor basado en el circuito de un mouse óptico para la odometría.
- El robot tiene un sistema operativo de tiempo real de código libre (FreeRTOS), lo cual permite una fácil gestión de la ejecución de las diferentes rutinas y procesos que debe realizar el robot. Sobre este sistema operativo, estará ejecutándose el programa del robot, el cual podemos dividir en varias capas, listadas a continuación (de alto a bajo nivel):
– capa de usuario o configuración del comportamiento
– capa de gestión del comportamiento
– capa de procesos/tareas específicas
– capa de drivers y acceso a hardware - Cabe destacar que la capa de gestión del comportamiento está basada en un motor de lógica difusa (en inglés Fuzzy Logic, el cual es un algoritmo de inteligencia artificial), que es el encargado de determinar el comportamiento del robot en función del estado de ciertas variables de entrada.



