Robótica Didáctica
Desarrollo y fabricación de un brazo robótico de seis grados de libertad controlado por computadora, para asistir a los estudiantes en el aprendizaje de materias relacionadas con mecánica racional, electrónica, programación y robótica.
Diseño mecánico
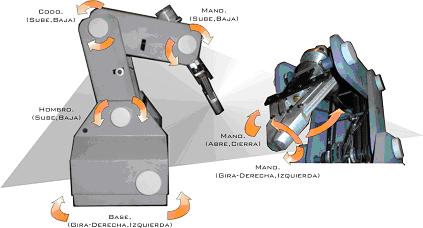
· Diseño general: el brazo posee seis grados de libertad (ver Tabla 1 y Fig.1) los cuales lo hacen muy versátil, y sus partes componentes son la base, el brazo, el antebrazo y la mano. El diseño se realizó mediante el software Autodesk Inventor 7 [1].
· Diseño Estructural: en este se buscó obtener poca masa en voladizo y buena resistencia. Para tener poca masa se utilizó para la estructura, chapa galvanizada plegada y soldada, y para aumentar la resistencia se le confirió un perfil con un mayor momento de inercia en el sentido de la solicitación.
· Motores y transmisión: para favorecer aún más la reducción de masa en voladizo se optó por colocar los motores en la base (salvo el de la mano). El movimiento se transmite hasta las articulaciones mediante una cadena cinemática de correas y poleas dentadas. Los motores utilizados (de origen nacional) son de corriente continua dotados de una reducción epicicloidal. Con este tipo de reducción se logra obtener muy buen par en un espacio reducido.
Diseño electrónico y de control
El control del brazo se realiza por software desde una computadora personal (PC). Se diseñaron y construyeron los circuitos de medición y control, que actúan sobre los motores e intercambian información con el software de la PC a traves de sus ports estándar. En estos circuitos se distinguen dos partes principales:
· Regulador de velocidad: Constituido principalmente por un microcontrolador PIC-16F84, es el encargado de generar la modulación por ancho de pulsos (PWM) que, previa etapa de potencia, actúa sobre los motores. La información que establece el ciclo de actividad del PWM se recibe desde la PC mediante el puerto serie.
· Medidor de velocidad/posición: Para el cierre del lazo de control, se diseñaron y construyeron encoders [2] compuestos por un sensor del tipo optoreflectivo y un disco impreso con rayas blancas y negras. Cada encoder esta acoplado al eje de la reducción de un motor. Los pulsos generados por el movimiento del motor se convierten en niveles lógicos TTL mediante un amplificador operacional y un inversor con schmitt-trigger. Finalmente, se ingresan a la PC por medio del puerto paralelo.
Software
Se desarrolló, mediante Visual Basic 6, un programa para PC que permite al usuario gobernar los movimientos del brazo robótico.
Básicamente ofrece dos modos de funcionamiento: manual y automático.
El primero presenta una pantalla con botones; uno para cada movimiento posible, al accionar sobre uno de ellos se logra el movimiento indicado. Además, sobre cada botón se presenta un contador que indica la lectura del encoder correspondiente.
El modo automático permite al usuario programar una secuencia de movimientos del brazo robótico. Para esto se deben cargar las instrucciones de los movimientos a ejecutar en una lista donde cada instrucción debe ir acompañada del valor de pulsos que se deben contabilizar mediante el encoder para considerar finalizada la maniobra.
Conclusiones
Se ha obtenido un brazo robótico cuyo desempeño, tanto desde el punto de vista mecánico como de control, es satisfactorio, cumpliendo así con el objetivo propuesto.
La experiencia y los conocimientos adquiridos con el desarrollo de este prototipo permitieron realizar desarrollos mecánicos posteriores aún más eficientes. Para trabajos futuros se considerará como una ventaja concentrar las funciones de control en un dispositivo independiente, dejando a la PC solo como interfaz con el usuario. Actualmente se está en proceso de desarrollo de un nuevo prototipo considerando las conclusiones aquí expuestas.



