Futbol de robots UTN-FRBA
Futbol de robots UTN-FRBA
“Equipo de Fútbol de Robots UTN FRBA” (DOC)
El equipo UTN FRBA se basa en una PLATAFORMA EN TIEMPO REAL Y SISTEMA DE MENSAJERÍA que permite analizar el estado actual del partido en función de estadístucas y predicciones que se realizan en tiempo real
Se desarrolló una plataforma diseñada para trabajar con “threads” donde los robots y rutinas auxiliares son tareas independientes que corren en forma paralela y se comunican entre sí por medio de mensajes, semáforos, etc.
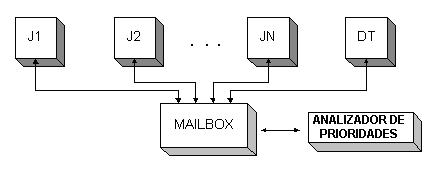
Director técnico virtual: Se encarga de manejar el funcionamiento global del equipo y generar un trabajo cooperativo entre robots. Para ello se cuenta con una asignación dinámica de los roles y un conjunto de directivas para mantener la formación de juego. Además, dispara órdenes a los jugadores para lograr trabajos cooperativos.
- Asignación dinámica de roles
- Control de la formación
- Disparo de órdenes a los jugadores
El módulo de lógica difusa le permite al director técnico tomar la decisión sobre la formación conveniente a utilizar. La lógica difusa es un sistema basado en reglas heurísticas. En nuestro caso, el resultado de estas reglas se basan en la experiencia humana.
El módulo de análisis de reglas consta de un set de 75 reglas basadas en la experiencia de un ser humano. Los sets de 75 reglas pueden ampliarse indefinidamente para volcar al director técnico la experiencia de varias personas a la vez.

El equipo UTN-FRBA obtuvo el 4º puesto nacional en la competencia CAFR 2005
Publicaciones asociadas
XIRPIC: XI Reunión de Trabajo en Procesamiento de la Información y Control, Universidad Nacional de Río Cuarto, 21 al 23 de septiembre de 2005
L. M. Di Matteo, A. C. Mangone, M. L. Muzzio, C. Verrastro
L. M. Di Matteo, A. C. Mangone, M. L. Muzzio, C. Verrastro
WCAFR: II Workshop de Inteligencia Artificial aplicada a la Robótica Móvil. 15, 16, y 17 de junio de 2005
Equipo de Fútbol de Robots UTNfrba (PDF)
L. M. Di Matteo, A. C. Mangone, M. L. Muzzio



